
Nadia de l’IHMC est une coéquipière humanoïde polyvalente


L’Institut de Floride pour la cognition humaine et machine (IHMC) est bien connu dans le milieu de la robotique bipède pour apprendre à marcher à des robots humanoïdes très complexes. Depuis 2015, l’IHMC abrite un Boston Dynamics Atlas (la version RDC) ainsi qu’une Valkyrie de la NASA, et des progrès significatifs ont été réalisés pour faire progresser ces plates-formes vers une mobilité et une manipulation fiables. Mais fondamentalement, nous parlons ici de matériel très ancien. Et il n’y a tout simplement pas beaucoup de bonnes options de remplacement (disponibles pour les chercheurs, de toute façon) en ce qui concerne les humanoïdes avec une force, une vitesse et une flexibilité comparables à celles de l’homme.
Il y a plusieurs années, IHMC a décidé qu’il était grand temps de construire son propre robot à partir de zéro, et en 2019, nous avons vu des concepts plastiques très cool de Nadia– un humanoïde conçu dès le départ pour effectuer des tâches utiles à une vitesse humaine dans des environnements humains. Après 16 (!) versions plastiques expérimentales, Nadia est maintenant un vrai robotet ça a déjà l’air assez impressionnant.
Pendant longtemps, nous avons repoussé les limites du matériel avec DRC Atlas et Valkyrie. Nous n’avons pas été en mesure d’explorer pleinement les limites de notre logiciel et de nos contrôles. Avec Nadia, c’est l’inverse, ce qui est vraiment passionnant du point de vue de la recherche.
—Robert Griffin, IHMC
Conçu pour être essentiellement la prochaine génération de DRC Atlas et Valkyrie, Nadia est plus rapide, plus flexible et suffisamment robuste pour constituer une excellente plate-forme de recherche. Il s’agit d’un hybride d’actionneurs électriques et hydrauliques : des bras électriques à 7 degrés de liberté (DoF) et un bassin électrique à 3 DoF, couplés à un torse hydraulique à 2 DoF et à des jambes hydrauliques à 5 DoF. L’hydraulique est constituée d’actionneurs intelligents intégrés, que nous avons couvert dans le passé. Les articulations de Nadia ont été disposées pour maximiser l’amplitude des mouvements, ce qui signifie qu’elle dispose d’un espace de travail de manipulation dense devant lui (là où cela compte vraiment) ainsi que de jambes très mobiles. Les coques en fibre de carbone recouvrant la majeure partie du robot permettent un contact sûr avec l’environnement.
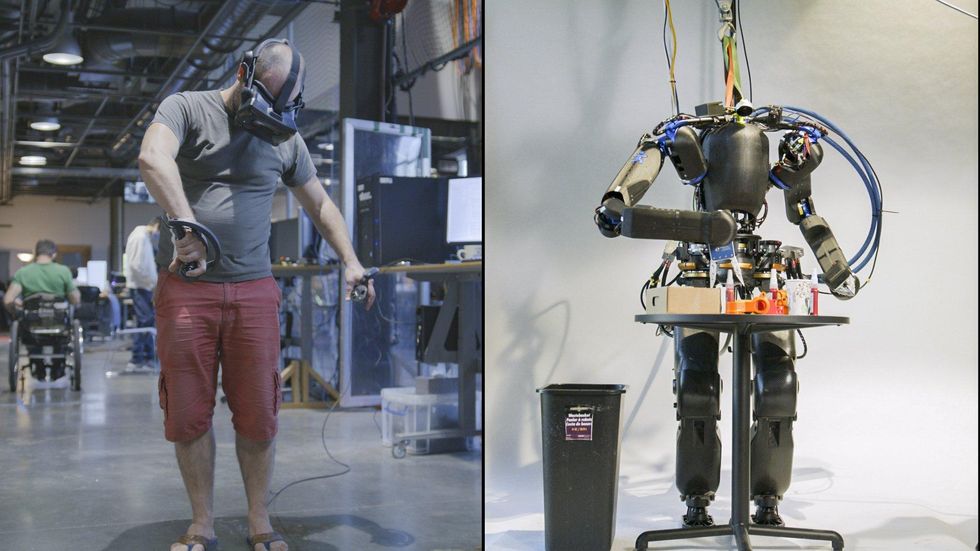
La téléopération grâce à la réalité virtuelle immersive aide Nadia à effectuer des tâches complexes.IHMC
Ce grand espace de travail de manipulation est particulièrement pertinent car l’accent est mis sur la téléopération immersive en réalité virtuelle avec Nadia. Non pas que l’autonomie ne soit pas importante, mais le concept derrière Nadia a été façonné (au moins en partie) par l’expérience d’IHMC au Finale du DARPA Robotics Challenge: Idéalement, vous voulez que le robot gère tout ce qu’il peut tout seul, tout en ayant un humain capable de prendre un contrôle plus direct sur des tâches complexes. Bien que ce ne soit pas le fantasme d’un robot entièrement autonome, le fait est qu’à court terme, cette approche est un moyen immédiatement viable d’amener les robots à faire des choses utiles de manière fiable dans des environnements non structurés. Dans l’ensemble, l’objectif avec Nadia est d’opérer le plus près possible de la vitesse humaine lors des tâches d’exploration et de manipulation urbaines. Et si cela implique qu’un humain télé-opère directement le robot parce que c’est la meilleure façon de faire les choses, Nadia est conçue pour le gérer.
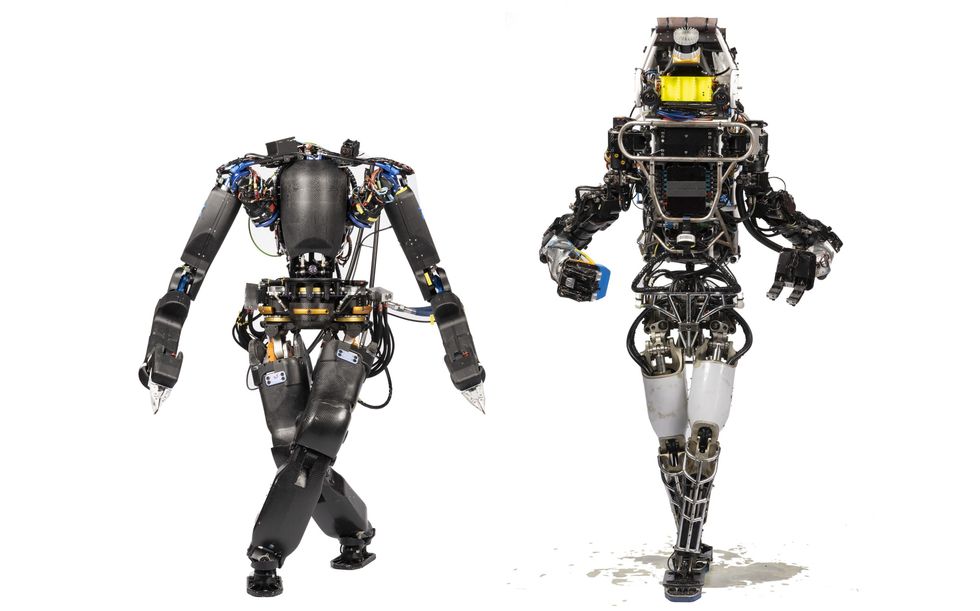
Nadia démontre à quel point ses hanches et ses jambes sont beaucoup plus flexibles par rapport à DRC Atlas.IHMC
Pour plus de détails sur Nadia, nous avons parlé avec Robert Griffonchercheur à l’IHMC.
En quoi Nadia est-elle unique parmi les robots humanoïdes ?
Robert Griffon : Je pense que la grande chose que nous essayons d’apporter à la table avec Nadia est la très grande amplitude de mouvement de beaucoup d’articulations. Et ce n’est pas seulement l’amplitude de mouvement qui différencie Nadia de nombreux autres robots humanoïdes, c’est aussi la vitesse et la puissance. Nadia a un bien meilleur rapport puissance/poids que le DRC Atlas, ce qui le rend nettement plus rapide, ce qui améliore sa vitesse opérationnelle générale ainsi que sa stabilité.
Pouvez-vous mettre en contexte vos objectifs avec Nadia dans le domaine de la robotique humanoïde ?
Griffon: Nous essayons de faire de Nadia un robot capable de fonctionner dans des environnements non structurés où vous ne savez pas ce qu’il doit faire à l’avance. Ainsi, au lieu d’avoir une séquence ou un nombre de tâches défini, nous essayons de construire un robot dans le matériel, les logiciels et les interfaces qui permettent à une équipe homme-machine d’aller dans un environnement inconnu, de l’explorer, de le cartographier et puis faites des tâches significatives.
IHMC a la réputation d’aider des robots humanoïdes complexes comme DRC Atlas et Valkyrie avec leur mobilité. Comment toute cette expérience s’est-elle retrouvée dans le design de Nadia ?
Griffon: Vous avez raison, et nous travaillons en partenariat avec JSC de la NASA depuis la RDC – quand vous voyez Valkyrie marcher maintenant, elle utilise le logiciel et les contrôleurs IHMC. Lorsqu’il s’agit d’appliquer certaines de ces connaissances à Nadia, nous avons accordé une attention particulière à des éléments tels que l’amplitude de mouvement de Nadia dans ses jambes. Contrairement à beaucoup de plates-formes humanoïdes, Nadia a un très bon roulement de la hanche (ou ab/adduction), ce qui signifie qu’elle peut faire des pas très larges et aussi des pas très étroits où les pieds se chevauchent. Nous pensons que cela va aider à augmenter la mobilité en aidant à ajuster les pas et à atteindre des points d’appui difficiles.
Au-delà du matériel, nous avons également pu utiliser nos outils de simulation et notre pile de contrôle pour vraiment nous aider à spécifier ce que la conception matérielle devait être pour accomplir certaines de ces tâches. Nous n’avons pas été en mesure d’optimiser toutes les articulations du robot – nous nous sommes pratiquement contentés d’un piston hydraulique simple dans les jambes, pour l’instant, mais nous espérons que nos futurs designs seront mieux intégrés et optimisés. Nous avons un actionnement complet de la cheville, contrairement à beaucoup de robots humanoïdes. Notre approche, dès le départ, a été de rechercher l’autorité de contrôle nécessaire avec les pieds de Nadia pour pouvoir effectuer un placement précis des pieds, et de l’utiliser pour une mobilité réactive relativement rapide.
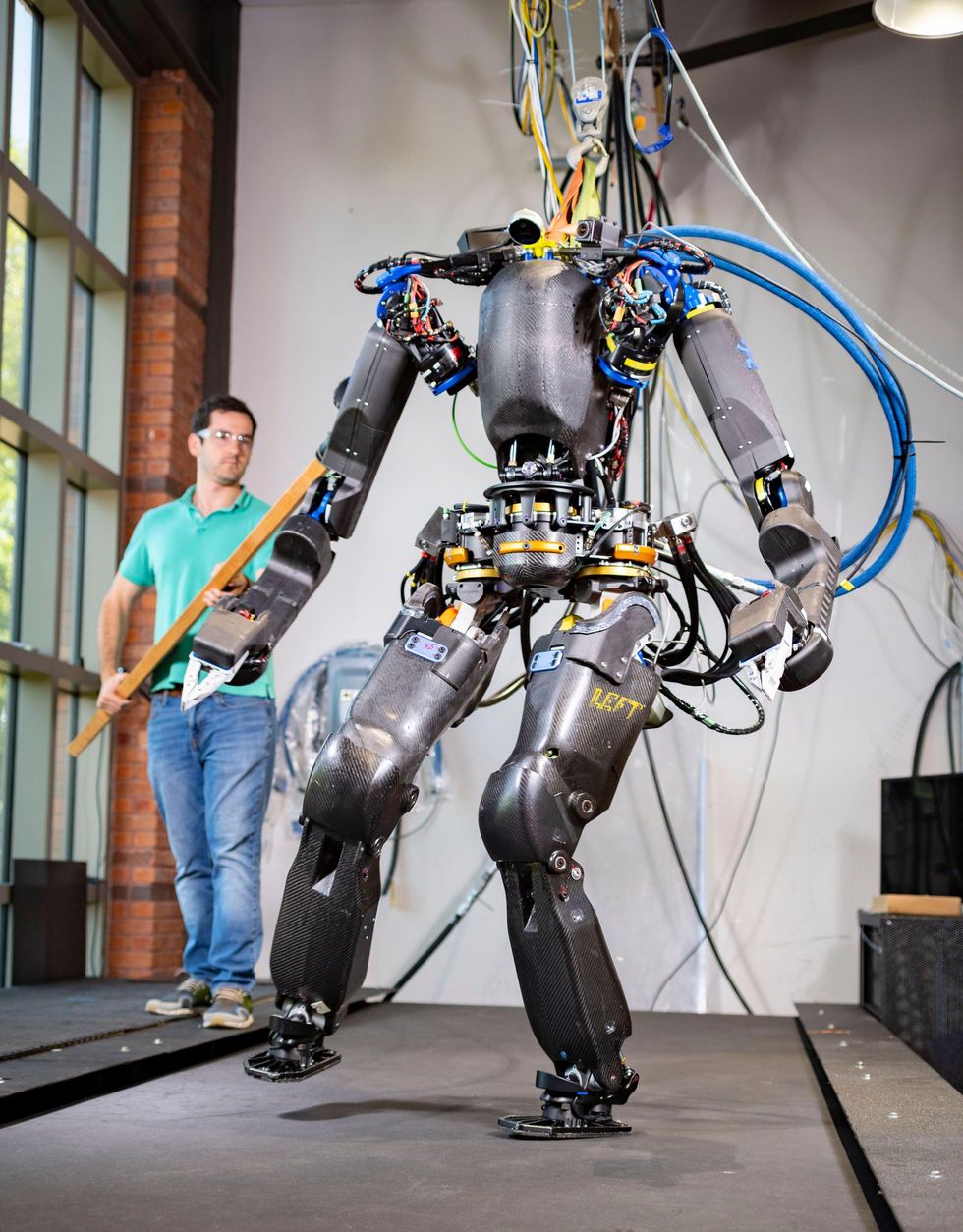
Robert Griffin donne à Nadia une poussée utile, pour la science.IHMC
En passant du concept au hardware avec Nadia, quels compromis avez-vous dû faire ?
Griffon: Nous ne sommes pas aussi flexibles qu’un être humain typique, bien que nous n’en soyons pas très loin. J’ai été surpris que nous ayons perdu une certaine amplitude de mouvement dans les mécanismes uniquement à cause de l’acheminement des flexibles hydrauliques, en particulier autour des hanches, où nous voulions éviter d’avoir de grandes boucles de flexibles suspendues au robot. Nous voulons éventuellement emmener Nadia dans le monde réel, et nous ne voulons pas que les tuyaux s’accrochent aux choses.
Nadia n’est pas aussi rapide qu’un être humain dans certaines articulations, et dans certaines articulations, elle est plus rapide. Nous ne sommes pas non plus aussi compacts que nous le voulions à l’origine, car, eh bien, les robots sont vraiment difficiles. Nous espérons le rendre un peu plus compact à l’avenir. Et nous avons un peu raté notre marge de poids – c’est environ 90 kilogrammes en ce moment, sans la pompe hydraulique ni la batterie à bord.
Pourquoi avez-vous décidé de vous concentrer sur la manière dont un humain peut contrôler directement Nadia en VR, plutôt que de mettre davantage l’accent sur l’autonomie ?
Griffon: L’autonomie fonctionne vraiment très bien lorsque vous savez quelles sont les conditions de fonctionnement et ce que vous essayez d’accomplir. Non pas qu’il soit facile d’automatiser cela, mais c’est faisable. Nous avons expérimenté une certaine planification et manipulation autonomes, et nous avons trouvé que c’est un peu limitatif dans la mesure où il ne tire pas pleinement parti des capacités de notre plate-forme. Et donc, ce que nous envisageons de faire, c’est d’essayer d’automatiser uniquement les éléments clés du système, des choses comme la planification des pas et la planification des prises, qui peuvent être assez bien automatisées. Mais nous avons également besoin de la capacité d’interagir avec de nouveaux environnements, c’est pourquoi nous nous concentrons sur le développement de moyens de faire équipe avec les humains via des interfaces comme la réalité virtuelle. Avec les capacités cognitives d’un humain combinées aux capacités de manipulation du robot, nous pensons que vous obtenez une tonne de polyvalence.
Quelle différence cela a-t-il fait pour contrôler Nadia en VR, que le matériel ait une flexibilité humaine et un espace de travail humain ?
Griffon: Pour la manipulation, ça a été énorme. Nous ne voulons pas que l’utilisateur utilise le robot et se sente limité dans ce qu’il peut faire en raison des contraintes du robot. Une grande partie des manipulations que nous avons pu faire avec Nadia, nous n’aurions jamais pu les faire avec nos autres plateformes.
Il y a certainement des compromis à faire – les bras sont plus conçus pour la vitesse que pour la force, ce qui va être un peu limitant, mais nous espérons améliorer cela à long terme. Je pense que la conception du robot – et en particulier du système de contrôle et de l’architecture logicielle – avec l’idée qu’un humain l’utilise a ouvert de nombreuses possibilités qui, nous l’espérons, nous permettront d’itérer rapidement sur de nombreuses voies différentes.
Quelles sont les choses dont Nadia sera particulièrement capable ?
Griffon: Nous espérons que le robot sera uniquement capable de locomotion multicontact – c’est une direction dans laquelle nous espérons vraiment aller, où nous ne comptons pas seulement sur nos pieds pour nous déplacer dans le monde. Mais je ne veux pas nécessairement dire qu’il sera meilleur que les autres robots, car je ne sais pas tout ce que les autres robots peuvent faire.
Y a-t-il des tâches pratiques que vous espérez que Nadia pourra accomplir à un moment donné dans le futur ?
Griffon: Des choses comme la réponse aux catastrophes, la remédiation nucléaire, l’élimination des bombes – ces tâches sont en grande partie effectuées par des personnes en ce moment, car nous n’avons pas de robots capables de les faire de manière adéquate malgré le temps que les roboticiens y ont travaillé. Je pense qu’en associant une excellente ingénierie robotique à des interfaces de fonctionnement et à une cognition humaine vraiment incroyables, ces tâches commenceront à devenir réalisables par un robot.
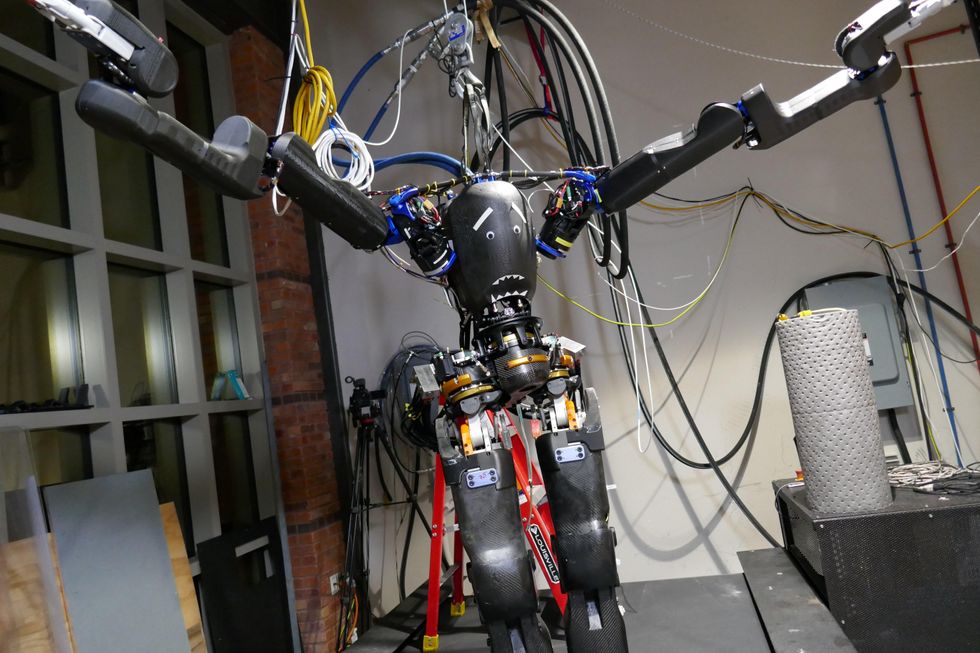
Qui a besoin d’une vraie tête quand on a des yeux écarquillés et une bouche de requin ?IHMC
Même si Nadia est toute nouvelle, IHMC a déjà un tas de mises à niveau prévues pour le robot. Le plus évident est de couper cette attache en mettant des batteries et une pompe hydraulique personnalisée dans le torse de Nadia. Également sur la feuille de route, des bras de couple plus élevés et des jambes plus légères et plus profilées. En attendant, le logiciel a beaucoup de rattrapage à faire pour permettre à Nadia d’atteindre son plein potentiel. Et si nous connaissons IHMC, cela va être une chose incroyablement excitante à voir.





